
Schema a blocchi
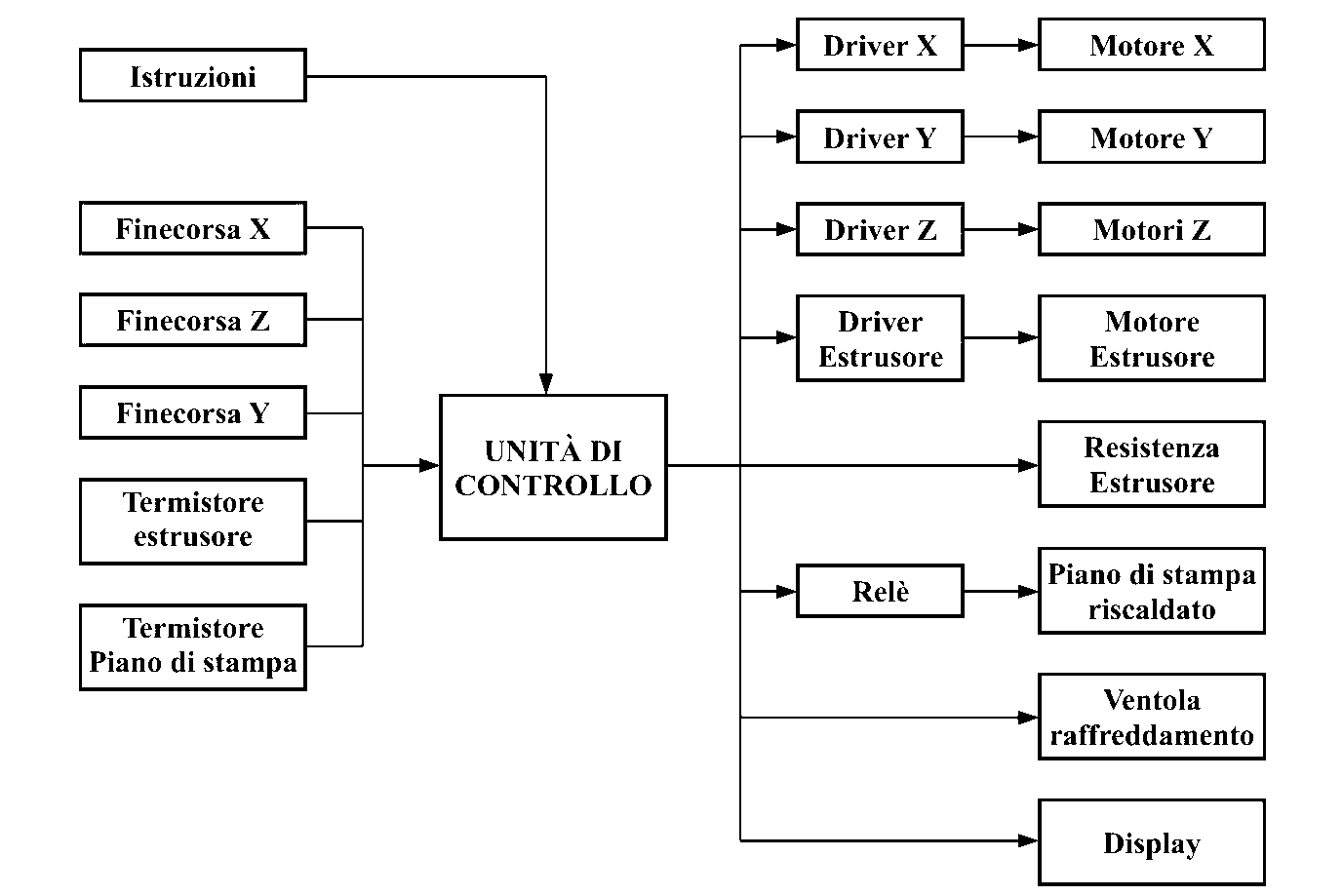
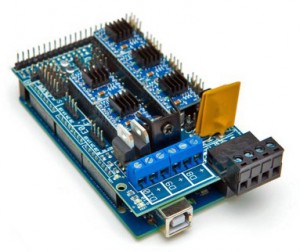 L’unità di controllo si basa sulla piattaforma Arduino Mega 2560 equipaggiata con l’apposito shield Ramps 1.4 per il controllo di carichi di potenza. Svolge la funzione di gestione dell’intero sistema basandosi sulla lettura delle variabili in ingresso e delle istruzioni inserite per la realizzazione di un modello, con lo scopo di interpretarle nell’azionamento dei vari attuatori.
L’unità di controllo si basa sulla piattaforma Arduino Mega 2560 equipaggiata con l’apposito shield Ramps 1.4 per il controllo di carichi di potenza. Svolge la funzione di gestione dell’intero sistema basandosi sulla lettura delle variabili in ingresso e delle istruzioni inserite per la realizzazione di un modello, con lo scopo di interpretarle nell’azionamento dei vari attuatori.
Le istruzioni possono essere trasmesse tramite una comunicazione seriale mediante interfaccia su computer oppure tramite una lettura diretta del file .gcode corrispondente, situato su un supporto di memoria esterno.
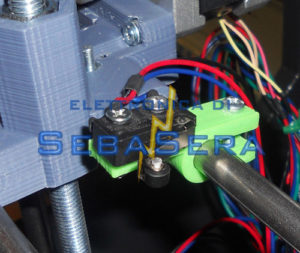 I finecorsa sono dei pulsanti che in questo caso sono posizionati all’inizio della corsa di ogni asse. Attraverso questi viene indicato all’unità di controllo, tramite segnali a logica positiva, il raggiungimento della posizione di inizializzazione di ogni asse, da cui prendere il riferimento per lo svolgimento di una stampa.
I finecorsa sono dei pulsanti che in questo caso sono posizionati all’inizio della corsa di ogni asse. Attraverso questi viene indicato all’unità di controllo, tramite segnali a logica positiva, il raggiungimento della posizione di inizializzazione di ogni asse, da cui prendere il riferimento per lo svolgimento di una stampa.
 I motori impiegati nella macchina sono di tipo passo-passo, una tipologia che viene azionata mediante impulsi attraverso degli appositi drivers, per generare il moto sugli assi con estrema precisione.
I motori impiegati nella macchina sono di tipo passo-passo, una tipologia che viene azionata mediante impulsi attraverso degli appositi drivers, per generare il moto sugli assi con estrema precisione.
La parte meccanica impiega complessivamente 5 motori, di cui 2 per l’azionamento dei 2 assi orizzontali (X,Y), altri 2 per l’asse verticale (Z) e il restante per la trazione del filamento termoplastico nell’estrusore.
 Il piano di stampa è costituito da una basetta di dimensioni 20x20cm, sulla quale è impressa una serpentina in rame che funge da resistenza elettrica, con la funzione di riscaldare il piano quando richiesto. Alimentandolo a 12V si ha un assorbimento in corrente di circa 13A, pertanto questo viene pilotato dall’unità di controllo tramite un relè. La lettura della temperatura è effettuata attraverso un termistore NTC, che permette all’unità di controllo di interromperne l’alimentazione al raggiungimento del valore richiesto.
Il piano di stampa è costituito da una basetta di dimensioni 20x20cm, sulla quale è impressa una serpentina in rame che funge da resistenza elettrica, con la funzione di riscaldare il piano quando richiesto. Alimentandolo a 12V si ha un assorbimento in corrente di circa 13A, pertanto questo viene pilotato dall’unità di controllo tramite un relè. La lettura della temperatura è effettuata attraverso un termistore NTC, che permette all’unità di controllo di interromperne l’alimentazione al raggiungimento del valore richiesto.
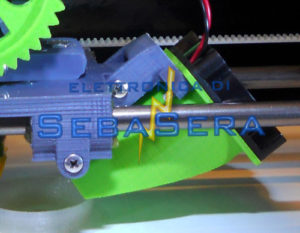
 L’estrusore è il blocco adibito all’estrusione del filamento termoplastico dopo averlo fuso per mezzo di una resistenza elettrica. La potenza dissipata da questa è regolata dall’unità di controllo utilizzando la tecnica PWM per garantire la perfetta stabilità della temperatura sul valore richiesto. La lettura di questa è effettuata secondo lo stesso principio del piano di stampa, attraverso termistore NTC. La trazione del filamento termoplastico è effettuata da un apposito bullone seghettato la cui rotazione è generata da un motore passo-passo attraverso due ingranaggi, volti a ridurre la frequenza di rotazione per aumentare la coppia con un rapporto di trasmissione pari a 4,3.
L’estrusore è il blocco adibito all’estrusione del filamento termoplastico dopo averlo fuso per mezzo di una resistenza elettrica. La potenza dissipata da questa è regolata dall’unità di controllo utilizzando la tecnica PWM per garantire la perfetta stabilità della temperatura sul valore richiesto. La lettura di questa è effettuata secondo lo stesso principio del piano di stampa, attraverso termistore NTC. La trazione del filamento termoplastico è effettuata da un apposito bullone seghettato la cui rotazione è generata da un motore passo-passo attraverso due ingranaggi, volti a ridurre la frequenza di rotazione per aumentare la coppia con un rapporto di trasmissione pari a 4,3.
 La ventola di raffreddamento del materiale è fissata al carrello della testina di stampa insieme ad un convogliatore, ed è volta a soffiare direttamente verso il foro di uscita dell’estrusore in modo da permettere un raffreddamento rapido dello strato di materiale appena posizionato. L’azionamento è normalmente programmato tramite slicing per lo svolgimento di stampe che utilizzano come materiale il PLA. Questo permette di effettuare stampe rapide senza provocare una deformazione dei modelli dovuta al posizionamento di uno strato sopra un altro che non si è ancora solidificato.
La ventola di raffreddamento del materiale è fissata al carrello della testina di stampa insieme ad un convogliatore, ed è volta a soffiare direttamente verso il foro di uscita dell’estrusore in modo da permettere un raffreddamento rapido dello strato di materiale appena posizionato. L’azionamento è normalmente programmato tramite slicing per lo svolgimento di stampe che utilizzano come materiale il PLA. Questo permette di effettuare stampe rapide senza provocare una deformazione dei modelli dovuta al posizionamento di uno strato sopra un altro che non si è ancora solidificato.
 Il display posizionato sul pannello frontale della macchina permette una rapida lettura delle variabili del sistema: la prima riga indica la temperatura dell’estruso
Il display posizionato sul pannello frontale della macchina permette una rapida lettura delle variabili del sistema: la prima riga indica la temperatura dell’estruso
re e del piano di stampa, mentre la seconda le coordinate sulla posizione degli assi. La terza riga mostra invece la velocità percentuale relativa a quella impostata tramite slicing, la percentuale di completamento e il tempo trascorso dall’avvio della stampa. L’ultima riga può mostrare diversi messaggi nel caso vengano rilevati eventuali errori. Il display è combinato con un pulsante integrato ad una manopola che permette l’accesso ad un menu per il controllo della macchina senza l’ausilio di un computer, ad esempio nel caso della stampa di un modello il cui file .gcode è situato su una scheda di memoria inserita nell’apposito slot, situato direttamente sul retro del display.
18,498 total views, 6 views today